
 MENU
MENU 

Instructors mail robot parts, develop video project amid sudden online semester
EECS 373 course instructors quickly pulled together an alternative final project that had students building robots at home.
 Enlarge
EnlargeGetting the parts for a robot in the mail isn’t how any student expected to wrap up the Winter 2020 semester. But a strange situation called for strange solutions, and the course instructors for EECS 373: Introduction to Embedded System Design were up to the task.
In the face of the abrupt shift to online learning in March because of the coronavirus, instructors were tasked with remaking their plans for the semester overnight. Lectures, labs, and exams all had to be adapted to a new online format, and the job was made even more challenging for courses that made heavy use of physical components and in-person projects.
EECS 373 was one such course. It teaches students the basics of the design of embedded systems, which are special-purpose computing devices not generally considered to be computers. This includes the smart devices now prolific in many homes, sensing systems, and computers in cars and other complex machines. Students in EECS 373 learn to work with the sensors, actuators, wireless conductivity, and computing components that make these systems so robust.
The course culminates in a final design project, which under normal circumstances is tackled in small groups and presented in a public demo session at the end of the semester. Determined not to leave students without their promised hands-on experience, the course instructors quickly pulled together an alternative plan that had students building robots at home.
“Traditionally, students form groups that work together to design their own solution to an embedded systems problem,” explains Prof. Ron Dreslinski, the course’s lead instructor. “This involves specifying the problem statement, selecting and ordering components, building the system, and debugging issues.”
With the move to remote learning, physical projects would prove hard to share. The course instructors began preparing over spring break for the possibility of a remote end to the semester, researching component kits that they could send to the students.
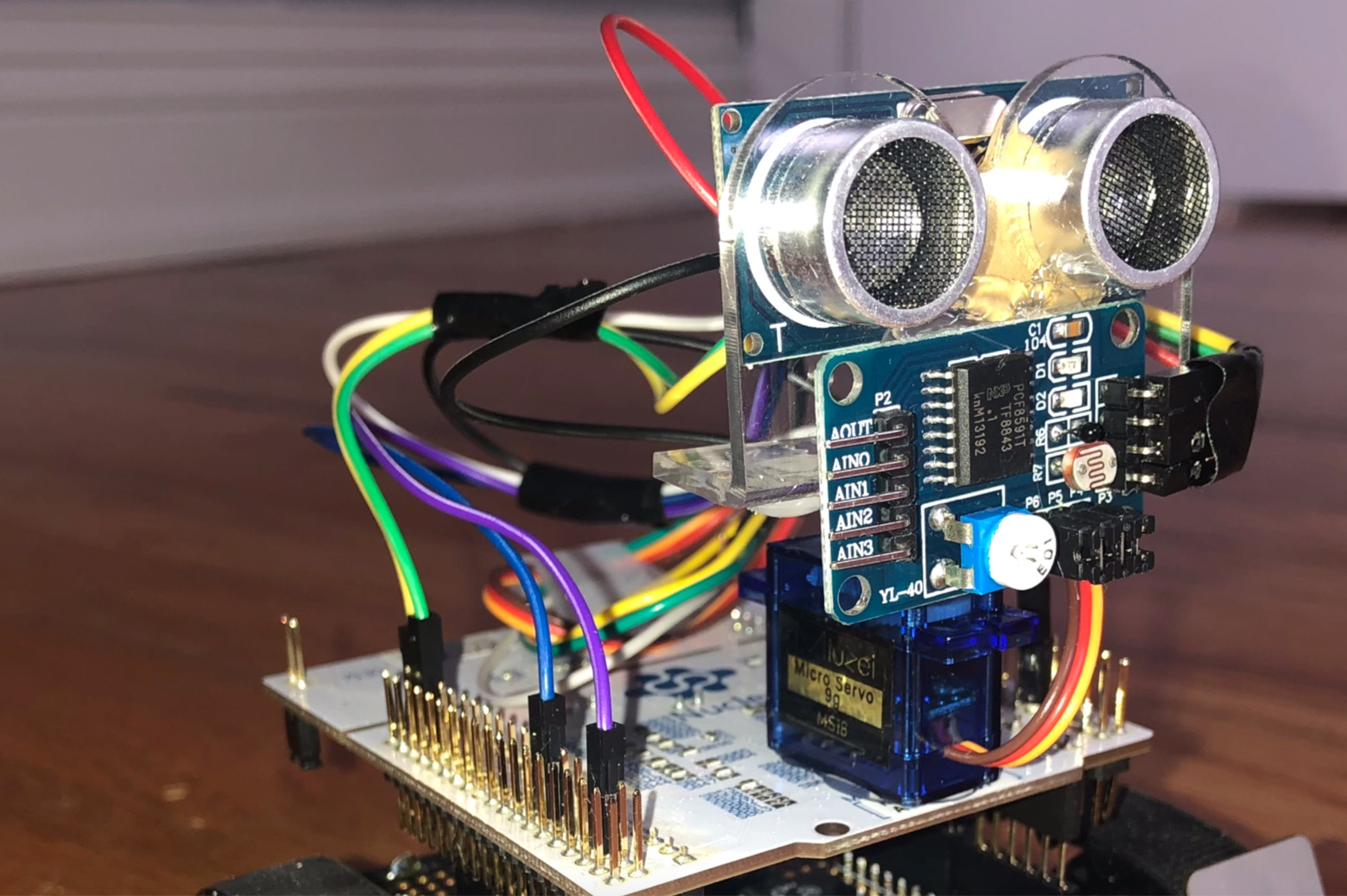
The students were mailed a kit of components and tasked with turning them into an autonomous robot that could detect and navigate towards the brightest light source in a room while avoiding any obstacles. Along the way, they had to learn how all the components work, studying a set of accompanying datasheets for more information. The kit included a light sensor, an ultrasonic distance sensor, an analog to digital converter, a robot chassis, an h-bridge motor controller, a servo motor for rotating the sensors, and a Nucleo development board.
“The students still had to read and interpret the datasheets and figure out how to integrate the pieces,” says Dreslinski. “We left the problem description vague, so that students had to define the corner cases and solution.”
The scope of the project turned out to be smaller than traditional group projects, but was sufficiently difficult for a single student, Dreslinski says. To submit their work, each student filmed a presentation and demo of their final design.
“This experience left us satisfied with the results given the amount of time for preparation,” says Dreslinski.
The need to wait for parts and to solder, assemble, and mail kits cut into the time students had for the projects, but Dreslnski is confident this can be alleviated in the future with more advanced planning.
“With more lead time, if we needed to do this again in the fall, we would be able to select a wider range of sensors to provide, as well as make the problem even more open-ended,” says Dreslinski. “We have already begun planning for such a scenario, and have begun adapting current labs to use the same style development board.”
Student reception of the project was positive in course feedback, with many showing appreciation for the opportunity to apply what they learned throughout the semester despite the challenging change in plans.
EECS 373 was led by Dreslinski, with Dr. Matt Smith serving as lab instructor and undergraduate students Tejas Harith, Mayukh Nath, Ritika Sibal, Alexander Skillin, and David Waier as instructional aids.